Genèse
Depuis de nombreuses années, une borne d’arcade est présente dans la cafétéria étudiante de l’école. Elle a cependant fait son temps et il ne reste malheureusement que son squelette et quelques éléments en guise de vestige… Les poignées des joysticks ayant servis de balle de babyfoot, ils sont par exemple portés disparus…

Le Club Informatique avait donc pour projet de recréer une nouvelle version, plus jolie et plus performante.
Hors la présence d’une nouvelle CNC (fraiseuse à commande numérique) au sein du Club Robotique a fait naître l’idée de créer un projet inter-club mêlant le Club Robot pour la partie conception et fabrication de la borne et le Club Info pour l’aspect design (peinture), logiciel (retro-pi) et la sélection des jeux. Cela est également l’occasion de rapprocher et renforcer la coopération entre les différents clubs de l’école.
Je me suis donc chargé de l’ensemble du développement mécanique : conception du modèle 3D de la borne et sa fabrication (usinage à la CNC, à la main, assemblage, finissions…). Pour se faire, j’ai été aidé par quelques membres du Club Robot et du Club Info : Daphné, Damien, Vincent, Matthieu, Nathan, Rémi, Mathis, Vincent… Merci à vous pour votre précieuse aide !
Cahier des charges
Cette borne d’arcade a deux principaux objectifs :
- Remplacer la précédente version de la borne au sein de la cafétéria étudiante (cela s’inscrit plus largement dans un projet de rénovation de la cafétéria opéré par le bureau des étudiants)
- Permettre d’être mobile afin d’être emporté et utilisé lors de divers évènements organisés par les clubs : journées portes ouvertes, barbecue des clubs et principalement lors des LAN jeux vidéos du Club Info (soirée jeux en réseaux organisé jusqu’au bout de la nuit trois fois dans l’année)
Seule la partie haute de la borne est intéressante à avoir lors d’évènements. Elle sera donc constituée de deux parties : un stand fixé à demeure à la cafétéria et la borne dites « bartop » qui peut-être utilisée sur son stand ou simplement posée sur une table.
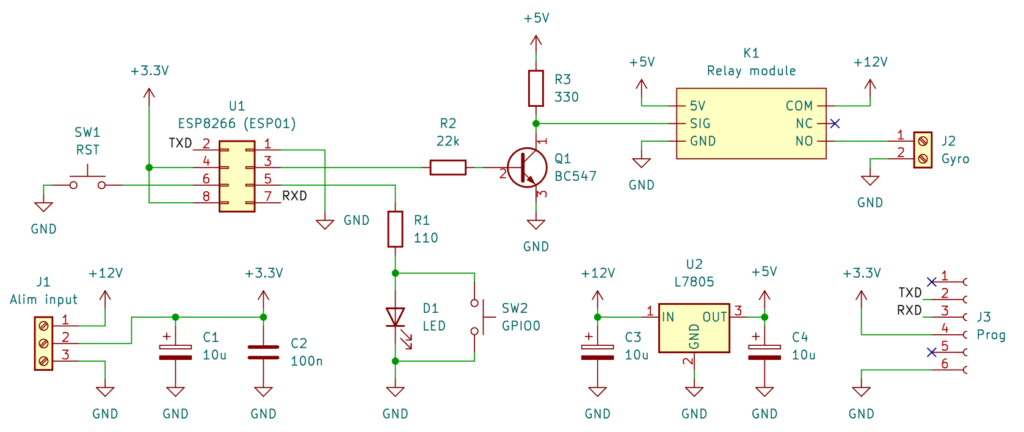
Côté électronique et informatique embarquée, la borne sera basée sur une Raspberry Pi 4 qui exécutera RétroPi, qui est un émulateur de jeux d’arcade.
Liste des fournitures
Il aura donc fallu acheter pour réaliser cette borne :
- 1 kit de démarrage Raspberry Pi 4 (2 Go de RAM) : 90 €
Il a été commandé à l’époque où les prix n’étaient pas encore affolants et où il y avait du stock ! - 1 kit contrôleur d’arcade deux joueurs (cartes d’acquisition USB, 8 boutons colorés par joueur et 4 boutons menu) : 45 €
- 1 écran d’ordinateur d’occasion 21.5″ : 20 €
- 1 lot d’enceintes filaires : 10 €
- Électronique diverse (ruban LED adressable, capteur de présence PIR…) : 30 €
- 2 panneaux MDF 250 x 122 cm de 18 mm d’épaisseur : 100 €
- Tasseaux sapin : 30 €
- 1 plaque plexi de récupération : 0 €
- Quincaillerie diverse (équerres, vis, serrure…) : 45 €
- Peinture et accessoires : 80 € environ
Le budget total de ce projet est donc d’environ 450 €.
Modélisation 3D
La première étape de la conception a été la modélisation 3D de la borne, d’abord sommaire pour définir son allure générale, puis détaillée afin de pouvoir passer à la fabrication. Elle est réalisée sur SolidWorks où chaque pièce unique est modélisée puis ajouté à l’assemblage général.

La borne sur son stand mesure 175 cm de hauteur, 77 cm de largeur et 51 cm de profondeur.



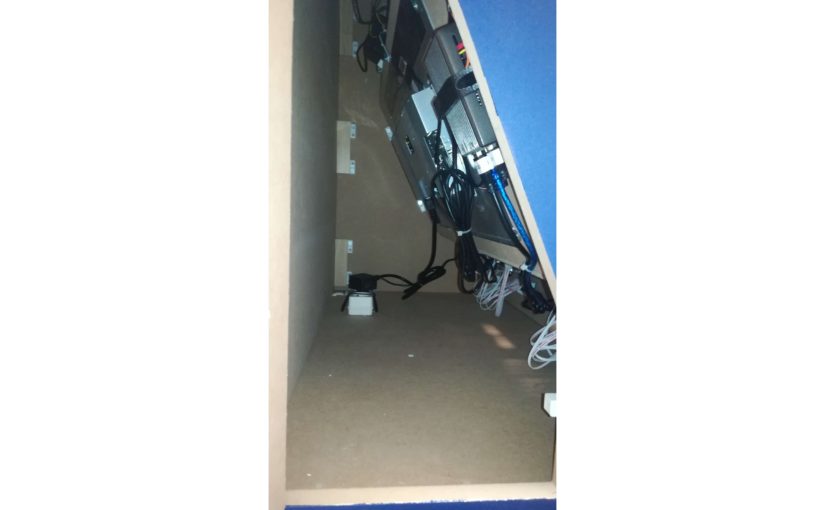
Les différents procédés d’assemblage sont réfléchis lors de cette phase : assemblages par tourillons, vissés, équerres… La plaque du milieu du pied est amovible, afin de permettre un accès aux tasseaux et la fixation du stand au mur. De la même manière, dans un objectif de simplifier la maintenance, une trappe est créée sur le côté gauche de la borne afin de permettre d’accéder simplement à tous les éléments de la borne et en particulier au Raspberry Pi. Via cette trappe, il est également possible d’accéder aux écrous papillons qui assurent la fixation la borne à son support et ainsi permettre sa désolidarisation. Si il y a besoin d’accéder plus simplement à l’intérieur, il est possible de retirer la plaque à l’arrière de la borne lorsque celle-ci n’est pas sur son stand.
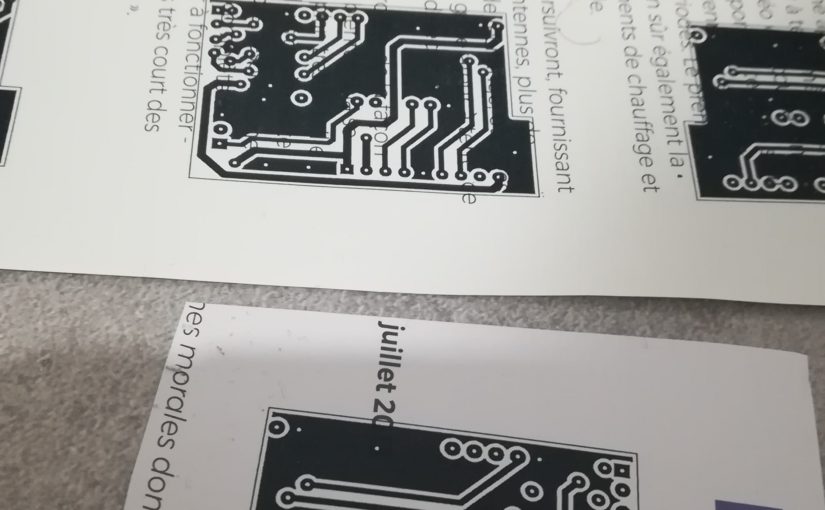
Lorsque le modèle est validé, les différents plans de découpe sont édités grâce à l’outil de mise en plan. Pour les pièces découpées à la CNC, les fichiers vectoriels sont exportés afin de pouvoir être ouverts par le logiciel de la machine.
Fabrication
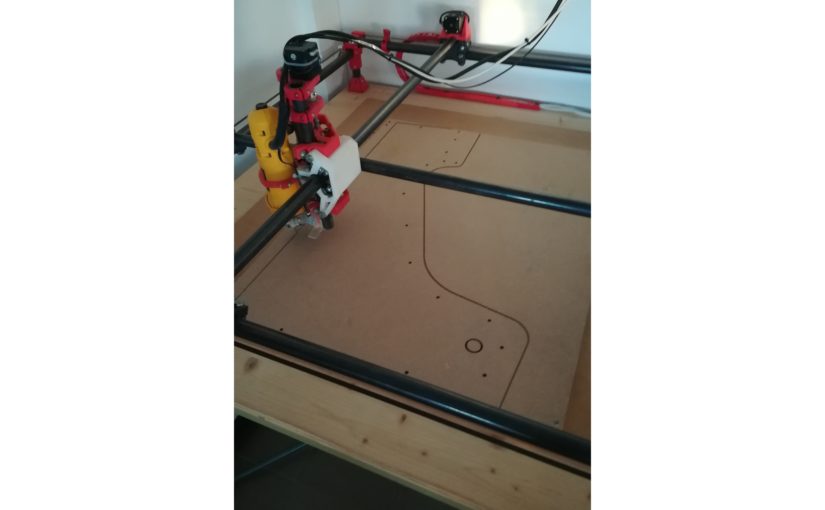
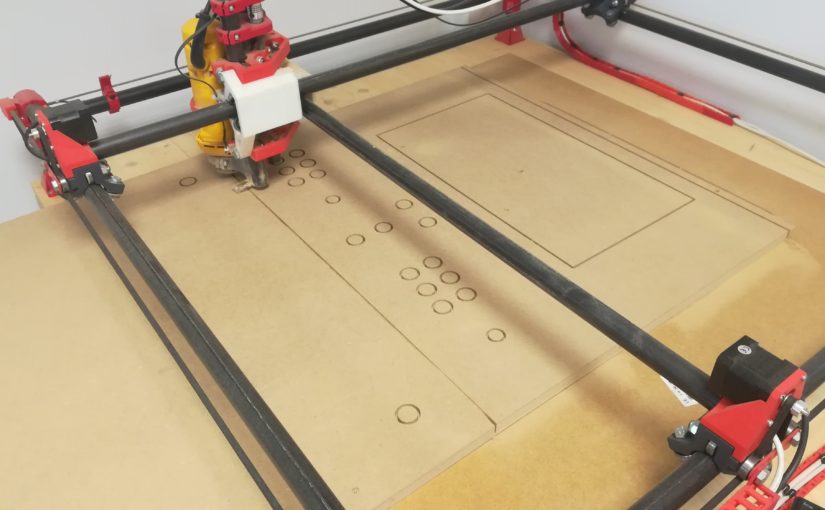
Usinage à la CNC
L’outil le plus important de cette construction est une CNC DIY de type « Mostly Printed CNC » qui a été donné par un de ses membre au Club Robot. Si cela vous intéresse, la documentation de ce modèle de CNC est disponible sur le site suivant : V1 Engineering Documentation.
La plupart des pièces avec des découpes arrondies ou avec des trous (pour les tourillons, boutons, écran…) sont réalisées grâce à la CNC.

Assemblage
Certaines autres pièces plus simple ont été fabriquées à la main. Merci à Nicolas pour le prêt de la scie circulaire, particulièrement pratique pour débiter les grands panneaux de MDF.
Au fur et à mesure de la fabrication des pièces, elles sont assemblées et la borne prend forme.


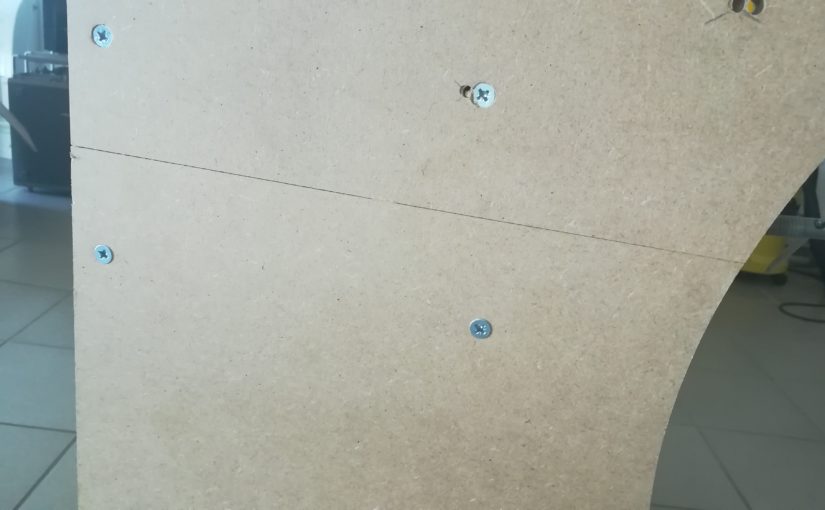




Afin que tous les éléments soient correctement maintenus en place, des fixations customisées sont modélisées puis imprimées en 3D.


Peinture et design
La peinture et le design de la borne est réalisé par le Club Info. Une première base violette / dégradé de bleu a été faites. Elle sera complétée par l’ajout de grafitis, dessins, motifs et autres dans un futur proche. Les logos des deux clubs y seront également représentés.





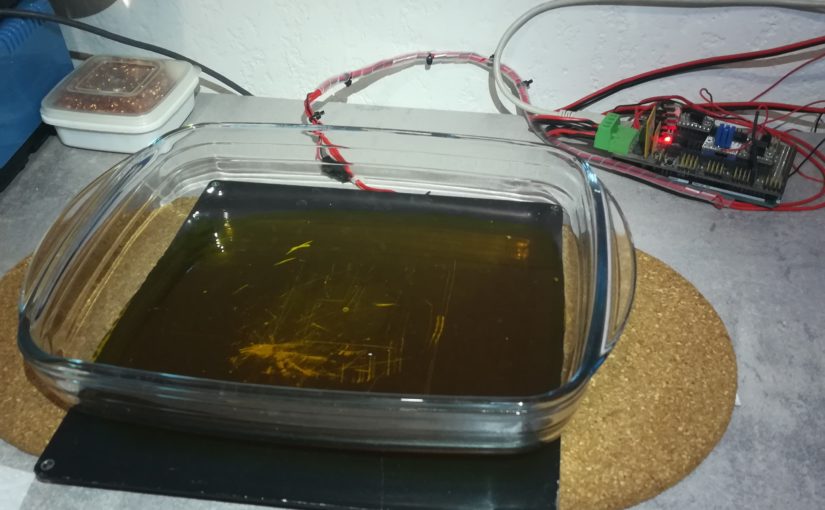
Je me suis chargé de réaliser la plaque en plexiglas sur le dessus de la borne. Grâce à sa gravure et son rétroéclairage, il s’agira de l’élément « tape à l’œil » de celle-ci. La découpe et la gravure de la plaque sont réalisées à la CNC. Un ruban de 44 LEDs adressables l’illumine et peut-être piloté par le Raspberry Pi.





Vu de près, on distingue aisément le parcours de la fraise et le rendu fait un peu brouillon. Il aurait été préférable de réaliser la gravure grâce à une découpeuse laser, cependant celle que j’aurais pu utiliser ne dispose pas d’un plateau suffisamment grand.
Rendu final
Une fois terminée et installée dans la cafétéria étudiante, la borne ressemble à cela :